1.モデルの概要
1.1 モデル名称
モデル名称:ファブラボを活用した多世代地域連携型プログラム人材育成モデル事業
対象地域:中国ブロック (山口県)
実証フィールドとなる学校名:山口市立大殿小学校
1.2 モデルの全体概要
国内外で拡がる市民参加型のデジタル実験工房「ファブラボ」*を活用し、地域でのプログラミング教育を推進する人的基盤を構築していきます。メンター育成ではファブラボ鎌倉で培われたメソッドを用いて、ファブラボ山口にてメンター育成とトレーニングプログラムを実施しました。地域内での継続的な活動を見据え、プログラミング教育を推進していく人材を確保し、教育関係者との連携を強化するとともに、モデル事業終了後も引き続きファブラボなどの拠点を活用しながら、山口市におけるプログラミング教育の活性化を図ります。多世代次世代型学習環境としての事例として今後展開できるよう、地域内における人材育成のハブ的機能も含め本モデル事業を計画し、他地域での展開を見据えた事業を行いました。
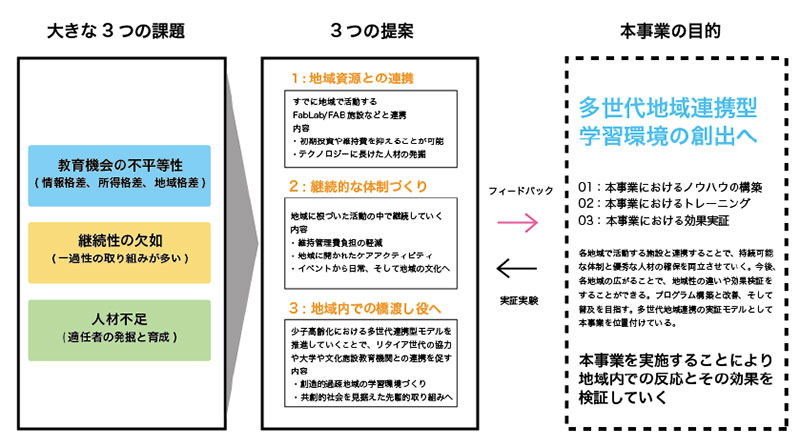
図1-1 : 課題に対する目的相関図
プログラミング教育を行うためには継続的な取り組みと、そうした活動を後押しする地域内での理解やサポートが不可欠です。予算、人材の確保、時間的制約、コミュニティー形成などの問題を解決していく必要があります。2011 年から日本各地で地域に根ざした活動を進めているファブラボなどの団体と連携することで、小中高大、市民、団体の枠組みを超えた体制づくりを期待することができます。本事業は、プログラミング教育を支援する人材を地域で育成しながら、かつ地域内部での理解と連携体制を強化し、持続可能な学習環境の構築とそうした状況に対する理解を促進するためのモデル事業となります。
ファブラボとは?
3D プリンタやレーザーカッターなどデジタル制御された多様な工作機械を取り揃え、モノをつくる技術を地域住民が身につけることで、個人や地域レベルの課題を住民自身が解決できるようになるための市民参加型の次世代実験工房です。2002 年、米国マサチューセッツ工科大学(MIT)から広がった取り組みで、現在80 カ国、1,000 箇所以上にファブラボが設立され、世界的なネットワークもその特徴のひとつです。ラボの規模や運営は各ラボが独立しているため異なりますが、顔が見えるコミュニティー形成を世界規模で促進し、プログラミングからデジタルものづくりのノウハウからデータまで共有を積極的に行っています。2011 年に東アジア初のファブラボとして、ファブラボ鎌倉とファブラボつくばが立ち上がり、現在日本国内では19 箇所のラボが立ち上がっています。
※本プロジェクトは、ファブラボ鎌倉とファブラボ山口の連携事業です
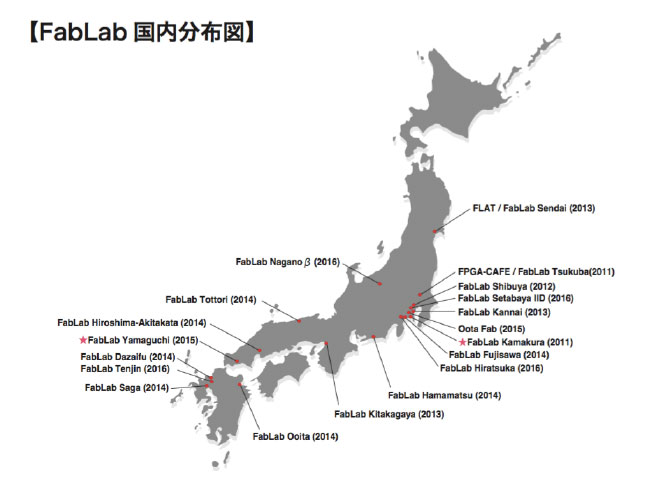
図1-2 : ファブラボ国内分布図

図1-3 : デジタルファブリケーション機器等
出典:平成27 年「ファブ社会の基盤に関する検討会報告書『ファブ社会推進戦略』p.5」
社会的背景 : IoT 社会促進を見据え、地域連携型プログラミング教育支援サポートのスキームづくりへ
IoT (Internet of Things)社会の促進は日本の成長戦略でもあり、世界的な動向でもあります。情報通信技術(ICT)の飛躍的な発展により、インターネットを介して「もの」と「情報」と「実社会」が相互に影響し合う新しい空間や環境がより身近になってきました。平成27 年「ファブ社会の基盤に関する検討会報告書『ファブ社会推進戦略』でも、デジタル工作機器の価格が低廉化し一般の市民層へ広がり始めたことで、生活者がテクノロジーを介したものづくりに触れる敷居も低くなり、モノの生産・流通・消費が大きく変貌し始めていると示唆しています。 本事業も、プログラミング教育を支援する人材の育成を進めながら、さらにIoT 社会における、地域連携型の人材育成トレーニングモデルの構築と教材のオープンソース化を目指し、プログラムの組み立てを行っています。

図1-4 : ファブ社会と創造的生活者
出典:平成27 年「ファブ社会の基盤に関する検討会報告書『ファブ社会推進戦略』p.15」
事業内容 : ノウハウの共有、教材開発を通じ連携することにより地域住民のスキルアップを図る
本事業では、ファブラボなどの施設の活用、地域間連携型の教材開発、学校のニーズに合わせた調整から講座運用までを一連の流れとして実施しています。メンター育成では情報技術のリテラシーのみならず、現場の学習環境に対して臨機応変に対応できるスキルを身につけ、そのノウハウを共有するスキル獲得も重要視しています。小学校の状況は、各学校の方針や集まる児童によって異なります。現場では、きめ細かい調整が不可欠です。日々、変化する情報技術において、マニュアル型の学習方法では対応に限界があり、自立型の学習をメンター自身のみならず地域コミュニティーが文化として育んでいく姿勢が非常に重要です。こうした理念を背景にしながら、各地域での実施プログラムの質を担保するために、本事業ではファブラボ鎌倉とメディア研究者(慶応義塾大学特任助教 山岡潤一氏)が共同開発したFABWALKER(ファブウォーカー)という歩行をデザインするための教育用ロボットを採用しています。また、本プログラムでは、モノのデータも情報のように共有する次世代型モノづくり社会も見据えて構成されています。教材のオープンソース化の可能性を感じてもらうために、光センサー、超音波センサーなど搭載する電子基板は各地で拡張できるよう、ファブラボ機材を利用し自作しています。WEB上でデータ共有することにより二次制作などを可能にする取り組みは、新しい教材開発のあり方でもあります。このように教材に関して開発や改変の余地を設けることで、地域素材を取り入れたロボットの制作、地域の高等専門学校や大学内でのスキルアップトレーニングの実施などを通じて地域貢献に寄与することができます。
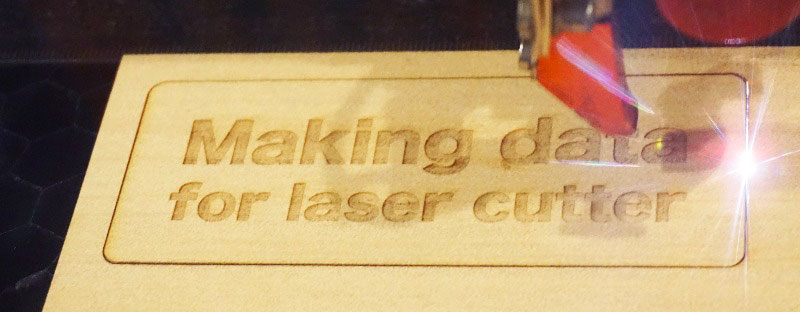
図1-5 : レーザー加工機 : レーザーによってさまざまな素材に彫刻・切断・穴あけ・マーキング加工を行う工作機械
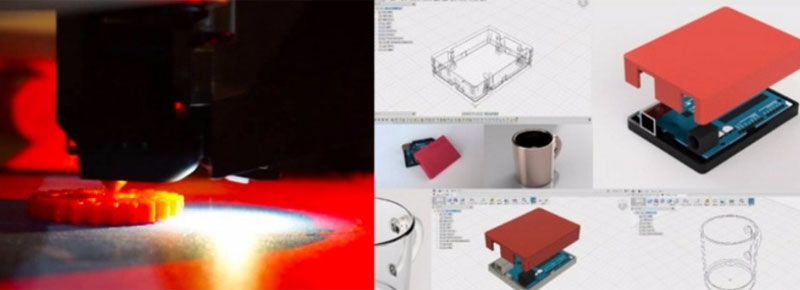
図1-6 : 3D プリンタ :コンピュータ上でつくった設計図をもとに、三次元の立体物を造り出す工作機械
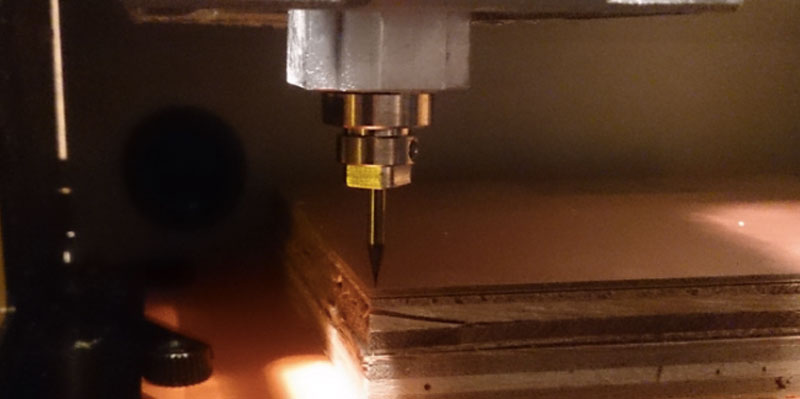
図1-7 : CNC ミリングマシン:コンピュータ上でつくった設計図をもとに、三次元の立体物を削り出す工作機械
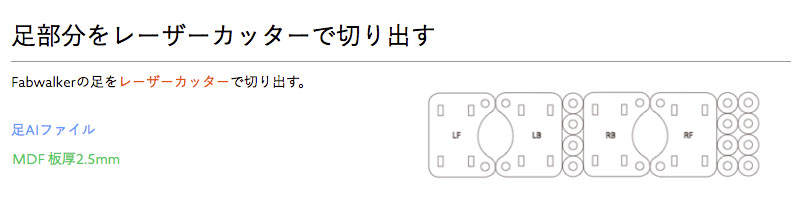
図1-8 : WEB上での3Dや2Dのデザインデータなど、ノウハウとともに、モノのデータもダウンロードすることができる
実施プログラム内容
題材名 : FAB WALKER プログラミングで生命を吹き込もう!
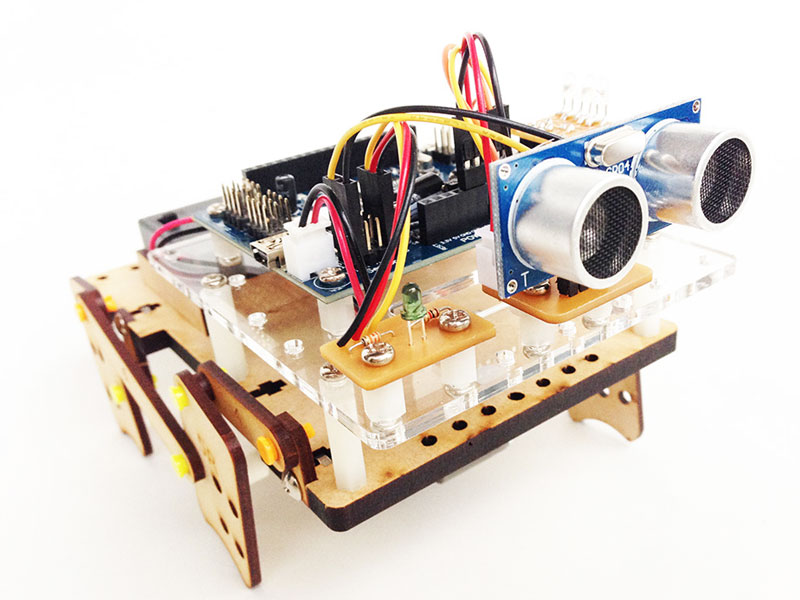
図1-9 : 足を取り付ける前のFAB WALKER(ファブウォーカー)
目標
- 1 億年後の生き物を想像しアイデアを形にする段階でプログラミングを用いて論理的に考え、実際に試行錯誤を繰り返し課題解決型のスキルを身につけることができるようになる
- ビジュアル言語(Studuino プログラミング環境)を用いて、プログラミングの基礎的な技能を習得できるようになる
設備・環境・指導の体制
- 1)実施場所 : 山口市立大殿小学校 視聴覚室(Windows PC 20 台 / インターネット完備 / サーバー有り)
- 実施前の準備
・人数分のFAB WALKER キット、Studuino マイコンボード、文房具等の部品を用意する
・児童用のWindows PC にStuduino プログラミング環境をインストール
・授業の前に1 人1 人がStuduino プログラミング環境を使えるように立ち上げておく
対象
山口市立大殿小学校 4~6 学年 20 名
指導の体制
講師:1 名 / 育成メンター:20 名 / サポート(ファブラボ鎌倉):2 名
実施体制図
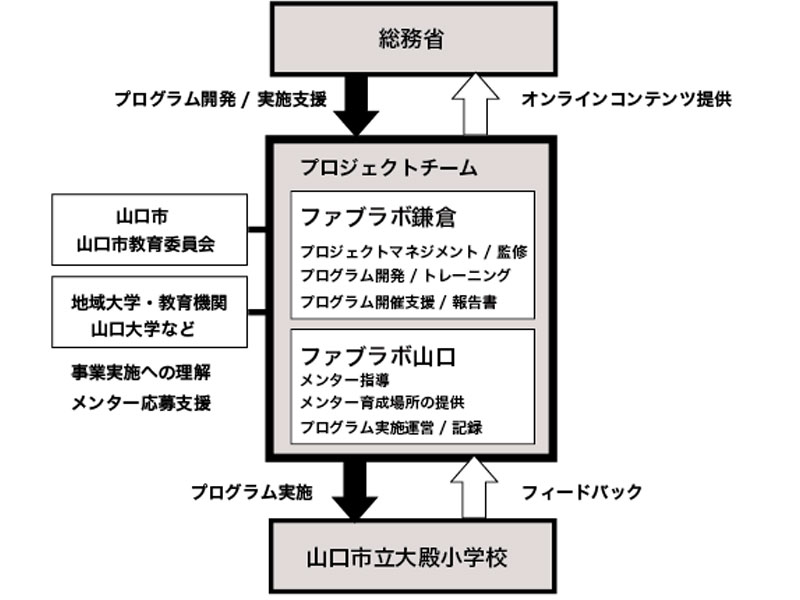
図1-10 : 実施体制図
授業計画案
| No. | 学習活動・内容 | 指導上の留意点 | 時間 |
|---|
| 1 |
FAB WALKER の組立 |
・機構を簡潔に説明し、FAB WALKER が動くしくみについての理解を促す
・モーターの動作はプログラミングで制御できることを伝え、次時からの実習への動機付けにする |
1 |
| 2 |
Studuino を用いた
プログラミング実習 |
・FAB WALKER とStuduino プログラミング環境を接続させて動作を確認することにより、プログラミングの結果を児童が実感できるようにする
・単純な制御から複雑な制御へと段階を踏みながら指導することにより、プログラミングのしくみを着実に理解・実践できるようにする
・モーター、LED、各種センサーなどなるべく多くの部品を制御する方法を示すことにより、各自の作品イメージを具体的にもつことができるようにする |
2 |
| 3 |
FAB WALKER
オリジナル作品の制作 |
・メンターの作例(プログラミングのスクリプトも含む)を例示することで、つくりたいロボットのイメージを具体的に持つことができるようにする
・「生き物の特徴」「設計図」「インプット/アウトプット」などの項目を書き込めるワークシートを用いて、児童の構想を具体化できるように支援する |
2 |
| 4 |
学習のまとめ
ふりかえり |
・作品発表
・自分の作品について簡潔に紹介できるようにスピーチの項目をあらかじめ定めておく |
1 |
補足 中学校学習指導要領 技術・家庭科[技術分野]との関連
A 材料と加工に関する技術 (3)ウ.部品加工,組立て及び仕上げができること。
B エネルギー変換に関する技術 (2)イ.製作品の組立て・調整や電気回路の配線・点検ができること。
D 情報に関する技術 (3)ア. コンピュータを利用した計測・制御の基本的な仕組みを知ること。イ.情報処理の手順を考え,簡単な
プログラムが作成できること。
(1)教材観
FAB WALKER(ファブウォーカー)とは、ファブラボ鎌倉と研究者(慶応義塾大学特任助教 山岡潤一氏)が開発を進めている、生き物を育てるようにプログラミングを学習するロボットキットである。ペンや木の枝など、身の回りにあるものでロボットの機能を拡張したり、センサーなどを利用することにより、あたかもロボットに動物の持つ「感覚」(視覚や触覚など)や手足、その他の器官を与えたような動きをさせることができる。生き物を育てるように、知性や感覚を与えるという行為の中で、プログラミングを実践的かつ身体的に学ぶことができる。プログラミングにはArduino 互換のマイコンボードStuduino を用いる。Studuino は、日本語による指示ブロックでプログラミングをすることができ、センサー等の取り付けも容易であることから、プログラミング初級者の児童にも親しみやすい教材であると考える。
(2)児童観
本教材FAB WALKER はロボットの造型が比較的自由であり、センサーの取り付け等によって生き物の
ような動き方や感覚を与えることができる。児童の想像する身近な生き物や空想の生き物の感覚や特徴
を、プログラミングを通して表現する楽しさから、プログラミングに親しみを持ち、すすんで技能を身に
つけることができると考える。また、個々の技能の習得に留まらず、学びの成果を発展させ、継続して学
び続ける環境を児童を中心として創造する必要がある。
(3)指導観
ひとり1 台のオリジナルFAB WALKER(以下ロボット)を完成させることで、プログラミングを用いて論理的に考え、基礎的な技能を習得し、他者と恊働しながら課題解決する能力を育むことができるように、次のように指導する。はじめに、ロボットを組み立てる。モーターやリンク機構などの構造を手を動かし組み立てることで、ロボットが動く仕組みに気付かせる。次に、ロボットをStuduino プログラミング環境によるプログラミングで制御する。LEDや各種センサーの制御方法をできるだけ網羅することで、オリジナルロボットづくりへの動機付けを高めるようにする。指導にあたっては簡単な制御から難しい制御へとスモールステップで行うことにより、全員が無理なく技能を身につけられるように配慮する。学んだプログラミングの知識・技能と、装飾や造型を組み合わせることで、児童ひとりひとりのイメージするロボットを制作する。ロボットの構想は身近な生き物や空想の生き物から着想させ、生き物らしさをプログラミングで表現させることに重点を置く。他の児童と交流しながら制作することを促し、他者と比較することによって自らの課題を発見でき、それらをまた自ら解決するきっかけを持つことができるようにする。
最後に、ロボットの発表会を実施する。実際にロボットを動かしてみたり、工夫した点や難しかった点を発表しあうことによって、他の児童が作ったロボットの良いところをみつけ、今後の自分のロボットの改善につなげる。また、記録された発表の様子(映像)やプログラミングのコードはクラウド上で共有し、次の学習者へ向けた資料・ふりかえりの資料として活用することができる。
指導にあたっては、いずれの活動においても効果的にグループ学習を導入し、児童同士への学び合いを
推奨する。メンターは適宜児童に助言をしながら、知識やアイデアを積極的に共有し学び合う雰囲気作り
の醸成につとめる。
2.モデルの内容
2.1 メンターの募集・研修について
2.1.1 メンターの募集・研修について
●実施スケジュール
メンター育成研修 : 4 日間 (平成28 年 10 月1・2・8・9 日)
小学校での実証:11 月-12 月 全6 回
「指導者育成研修」として、地域メンターの育成を実施。育成対象者のほとんどがプログラミング未経験
者。4 日間の研修を通じてプログラミングやものづくりの知識・技術を実践的に身につけ、小学生にとっ
て魅力あるカリキュラムをメンター自ら構成していきました。
2.1.2 メンター募集方法
●募集期間
一次募集:8 月6 日-9 月10 日(35 日間)
二次募集:9 月10 日-9 月30 日(20 日間)
ファブラボ山口 運営メンバー(山口大学大学院教育学研究科修了)による呼びかけ
山口大学教育学部の研究室を通じて告知
SNS : facebook などを通じて
図2-1 : 紙媒体 メンター募集チラシ
2.1.3 メンター募集対象(メンター種別)
●応募時の掲載概要
山口市大殿小学校の児童を対象に、ものづくりx プログラミングの講座を実施します。メンター(指導者)
となる大学生は、プログラミングやものづくりの知識はもちろん、指導案作成や模擬授業を通じて、学び
をデザインする力を身につけることができます。
●対象
- 山口市内に在学生している大学生・大学院生 ・教員を目指し、プログラミング教育に興味関心のある方 ・ファシリテーション・学びの環境デザインに興味のある方 (学年・教員免許取得の有無、校種、プログラミングの経験の有無は問いません)
- 山口市内に在学生している大学生・大学院生
- 教員を目指し、プログラミング教育に興味関心のある方
- ファシリテーション・学びの環境デザインに興味のある方
(学年・教員免許取得の有無、校種、プログラミングの経験の有無は問いません)
2.1.4 メンター種別の選択理由
優秀な人材発掘と学部を越えた多様な学習コニュミティー形成
- 山口大学で学ぶ学生を対象とすることで、継続的な関わり合いを期待
- 教育学部の学生中心に、学科を横断した学び合いのコミュニティー形成
- その他興味のある学生を幅広く受け入れる : 理学部、国際総合科学部など
- プログラミングに長けた人
- 教えるのに長けた人
- 芸術センスに長けた人
- デザインセンスに長けた人
- 地域と大学をつなげるのに長けた人
- 地域と地域をつなげるのに長けた人
2.1.5 メンター募集に関する工夫
- 山口大学の教育学部の先生方に研究室ごとに告知をしていただく
- 山口大学教育学部のネットワークに直接呼びかける:SNS やfacebook など
●採用した参加者の所属
- 山口大学大学院教育学研究科 教科教育専攻美術教育分野
- 山口大学大学院教育学研究科 教職実践高度化専攻 教育実践開発コース
- 山口大学教育学部 教育学部教科教員養成コース美術教育選修
- 山口大学理学部 物理・情報科学科 情報科学コース 4 年
- 山口大学教育学部 表現情報処理コース3 年
- 山口大学教育学部 技術教育選修4 年
- 山口大学国際総合科学部 1 年
- 山口大学教育学部情報教育コース 1 年
- 青山学院大学/山口情報芸術センター インターン
- ファブラボ山口 利用者
- 北九州イノベーションギャラリー
※重複している学部がある場合は、まとめて記載しています
2.1.6 メンター研修期間
図2-2 : プログラムスケジュール
2.1.7 メンター研修方法
●メンター育成研修 : 4 日間 (平成28 年 10 月1・2・8・9 日)
| メンター研修実施内容 / スケジュール |
|---|
1 日目
実施日:10 月1 日(土)
イントロダクション
実施プログラムを受講 |
10:00 - 11:00 イントロダクション / 社会的動向 / FabLab の講義
11:00 - 12:00 プロジェクト概要説明
12:00 - 13:00 お昼休憩
13:00 - 14:00 実施プログラム受講 DAY 1
14:00 - 15:00 実施プログラム受講 DAY 2
15:00 - 16:00 実施プログラム受講 DAY 3
16:00 - 17:00 実施プログラム受講 DAY 4
17:00 - 18:00 ふりかえり

図2-3 : 講座の様子
社会的動向と地域と教育の役割を考え、実際の講座を体験する |
2 日目
実施日:10 月2 日(日)
プログラムを受講
実施準備 |
10:00 - 11:00 実施プログラム受講 DAY5
11:00 - 12:00 実施プログラム受講 DAY 6 発表会
12:00 - 13:00 お昼休憩
13:00 - 14:00 全体ふりかえり
14:00 - 15:00 実証校での実施体制を決める
15:00 - 16:00 ノウハウ共有 / 教材及びサンプル作成
16:00 - 17:00 学習者の創造性向上の方法を模索
17:00 - 18:00 次回までの課題設定

図2-4 : 実際に児童と同じプログラムを受講するメンター |
3 日目
実施日:10 月8 日(土)
実際にメンターが講師となり
有志で集まった小学生や社会人を対象に
リハーサルを行う |
10:00 - 11:00 実施準備 / 確認
11:00 - 12:00 講師シミュレーション DAY 1
12:00 - 13:00 お昼休憩
13:00 - 14:00 講師シミュレーション DAY 2
14:00 - 15:00 講師シミュレーション DAY 3
15:00 - 16:00 講師シミュレーション DAY 4
16:00 - 17:00 講師シミュレーション DAY 5
17:00 - 18:00 講師シミュレーション DAY 6 : 発表 / ふりかえり

図2-5 : 地元小学生に協力してもらい、実際にシミュレーションを行う |
4 日目
実施日:10 月9 日(日)
実施を想定した教材の準備
資料の改変・新規サンプル
資料の作成 |
10:00 - 11:00 実施準備 : 役割分担 / シフト確認
11:00 - 12:00 実施準備 : 各グループ作業
12:00 - 13:00 お昼休憩
13:00 - 14:00 実施準備 : 各グループ作業
14:00 - 15:00 実施準備 : 各グループ作業
15:00 - 16:00 実施準備 : 各グループ作業
16:00 - 17:00 実施準備 : 各グループ作業
17:00 - 18:00 最終確認 / ふりかえり

図2-6 : 議論する学生の様子 |
2.1.8 メンター研修に関する工夫
●カリキュラム / 素早い教材開発 : 実践を通じて、アイデア、ノウハウの共有・開発・改変方法を学ぶ
メンター自ら、実施状況に合わせ教材の改変や追加
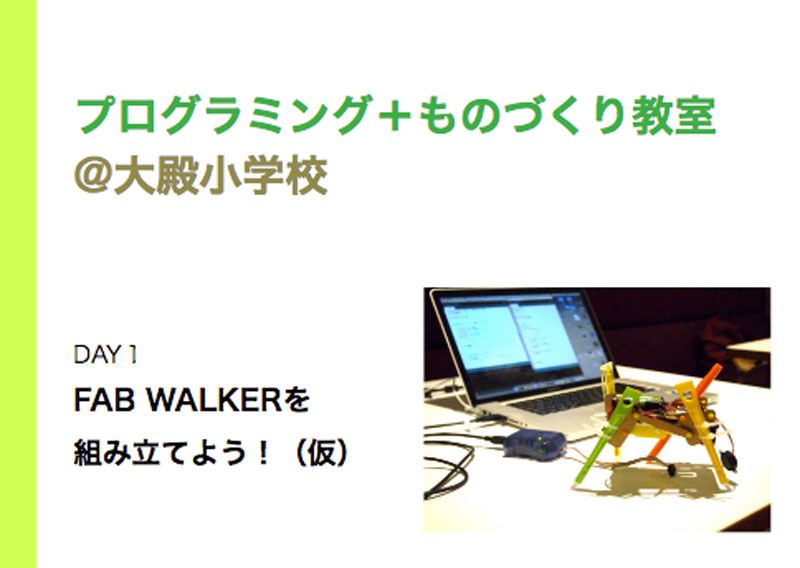
図2-7 : 講座で使用する教材 / 学生により改変中の資料例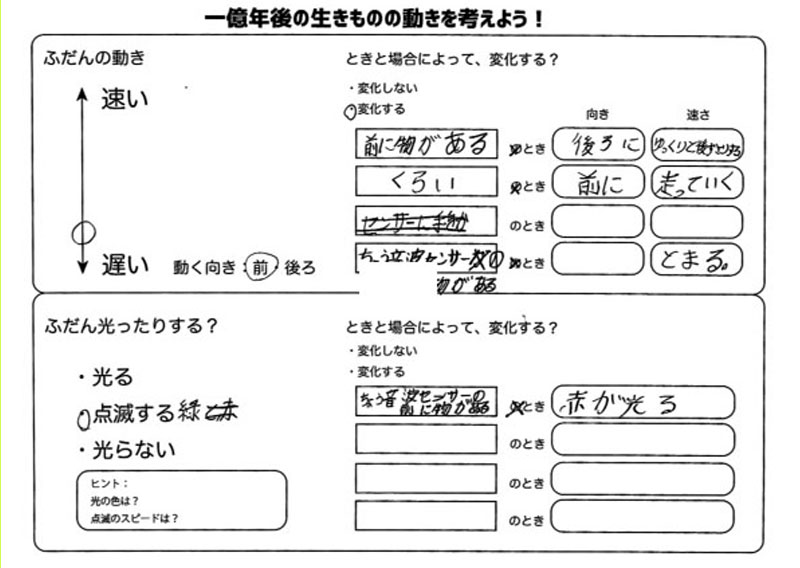
図2-8 : 追加作成されたプログラミングワークシート
多様な分野が集まることで学び合いを促進

図2-9 : プログラミングが得意なメンターが教える側へ
図2-10 : 実施プログラムを体験し感じたことを共有
●学習者のプロファイリングの実施 : 学習者の心理や観察の共有を通じて現場での対応力を身につける
| 学習者自身による記述 (心理的状況・時間軸と理解度) | セッション終了後に、メンター同士で共有 |
|---|
1 日目:組立セッション
講座後、児童に記述しやすいフォーマットで実施
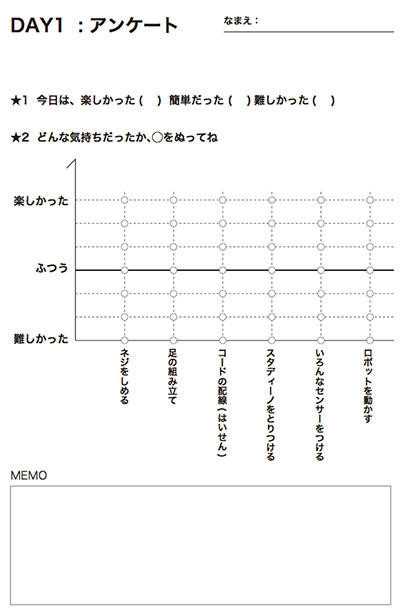
図20 : アンケート フォーマット
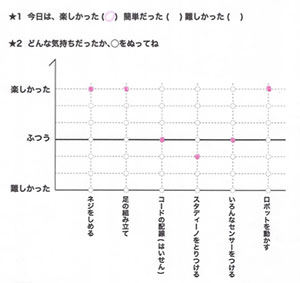
図2-12 : 児童A による1 日目アンケート結果 |
1 回目: (児童A に対する担当メンター記述)
A さんは、グループ1 のしっかり者で、ハキハキとよくしゃべります。同じ5 年生のK くんの面倒をよく見てあげていましたが、代わりに部品を組み立ててあげるなど、少し干渉しすぎなところもあったかもしれません。足の組み立てのペースはかなり早かったです。プッシュリベットをひとりで外すことができません。先生役になれる素質もあるのですが、本人はどちらかというとどんどん先に進みたいタイプ。少々せっかちですが、作業は確実です。4 人の中では、自分で見本と手順書を読んでどんどん先にすすんで取り組んでいました。

図2-11 : 1 日目 組み立ての様子01
レーザーカッターで切り出されたロボットキットと児童

図2-14 : 1 日目 組み立ての様子02
見本と手引きをヒントに、自分のロボットを自分で組み立てる |
2 日目:プログラミング (児童A による記述)
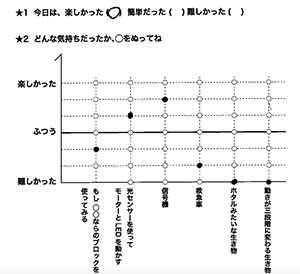
図2-13 : 児童A による2 日目アンケート結果 |
2 回目 (児童A に対する担当メンター記述)
A さんの良いところは、とにかくいい笑顔と返事。信号機の実
習のときに「A4」を選んでいて、「これは何色?」と尋ねる
と、「赤のつぎだから黄色」と答えた。「試してみて」という
と「青」が点灯。「あっ」と良い表情。「気づいたことは隣の
人に教えてあげて」と促すと、よきお姉さんになってくれる。
「実行⇒テストモード開始」操作をよく忘れていたが、救急車
などの課題はとても早く完成していた。

図2-15 : 2 日目の講座風景 |
3 日目 : プログラミング (児童A による記述)
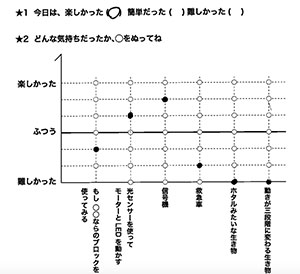
図2-16 : 児童A による3 日目アンケート結果 |
3 回目 (児童A に対する担当メンター記述)
マイペースなY ちゃん(4年生児童)のよき指導者に、A さん
はなっていた。「教えてあげて」「みてあげて」と言うとよく
面倒をみてくれます。Y ちゃんのほうが早くできるとちょっぴ
り悔しそうです。チャレンジタイムではホタルを作成しまし
た。「モーターM1 を正転」を最初に入れ忘れていたので「忘
れているブロックがあるよ、DAY2 の資料を見返してみて」と
いうとすぐに気づいて自分で修正ができました。

図2-18 : 3 日目の講座風景 |
4 日目 : プログラミング (児童A による記述)
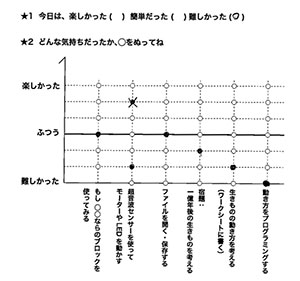
図2-17 : 児童A による4 日目アンケート結果 |
4 回目 (児童A に対する担当メンター記述)
A さんは、宿題のアイデアシートを具体的に記入してきていま
した。そのためプログラミングワークシートも早々に埋めるこ
とができ、実装に入りました。複雑なプログラミングでした
が、ほとんど自力で頑張って作成しました。最初は前進するは
ずなのに、いざ書き込んでみると逆転から始まってしまい、戸
惑っていました。時間内に修正ができなかったのですが「これ
はこれで、まあいいや」と本人の中では折り合いをつけている
感じでした。

図2-19 : 4 日目の講座風景 |
5 日目 : プログラミング (児童による記述)
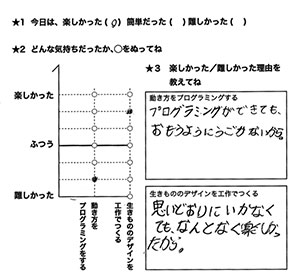
図2-20 : 児童A による5 日目アンケート結果 |
5 回目 (児童A に対する担当メンター記述)
すでに、A さんは、プログラミングはほとんどできているとの
ことだったので「ウサカメ1 号」という、うさぎとかめが融合
したようなデザインの作成にとりかかろうとしました。しか
し、いざ確認してみると光センサーの判定がうまくいっていな
いようで、思い通りに動かないと困惑していました。もう一度
プログラミングをよく見直すと、不等号の向きを間違えていた
ことがわかり、修正することができました。MAKE(工作)で
は作業に夢中になって、終わりの時間になってもなかなかやめ
ることができませんでした。早めに声をかけてあげることが必
要だと思いました。

図2-22 : 5 日目の講座風景 |
6 日目 : プログラミング (児童による記述)

図 2-21 : 児童A による6 日目アンケート結果

図2-24 : ワークシートを書き込む様子 |
メンター発案ワークシート1
発表会時児童作成資料
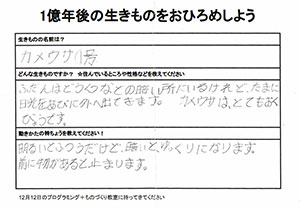
図 2-23 児童A が記述した発表用解説ワークシート
学習者が発表しやすいようメンターが発案

図2-27 児童A による1 億年後の生き物 「カメウサ1 号」 |
メンター発案ワークシート 2
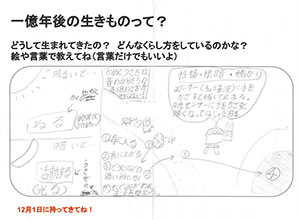
図2-25 : メンター発案による宿題シート(児童A が記述) |

図2-28 : 1 億年後の世界の生き物を動かす |
メンター発案ワークシート 3
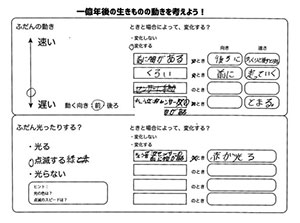
図2-26 : メンター発案によるワークシート |
学習者がイメージを膨らませ、論理立てて作業を
進めるためにメンターが発案したワークシート
※児童の理解度の把握、何をしたいのかの把握、
そして担当メンターでなくとも、すぐにサポート
できるようにと作成されました。 |
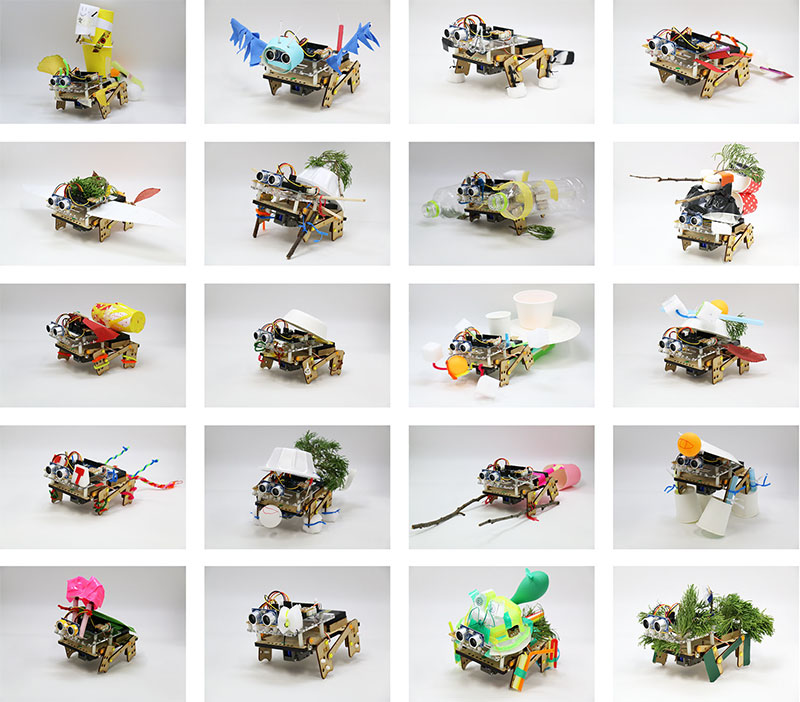
図2-29 : 児童による作品一覧
2.1.8 メンター研修に関する工夫
- メンター自身が積極的に提案し、教材、ワークシートの開発などを行う余白をプログラムに入れ込む
- 担当児童をよく観察し、学習者の変化やサポートのあり方を全体で共有することで深い共有知を増やす
- メンターがいつでも交代できるように、ノウハウや引き継ぎのフォーマット化をする
- 自発的に集まり、お互いの自由な意見交換を尊重する
- 出席できないメンターのフォローも議事録などを共有することで、フォローを行う

図2-30 : 参加児童と制作作品
2.2 児童生徒の募集・学習について
2.2.1 児童生徒の募集期間
平成28 年10 月3-7 日(5 日間)
2.2.2 児童生徒の募集方法
学級担任よりチラシを配布し、希望者を募った
配布したチラシ : 両面印刷

2.2.3 児童生徒の対象学年
小学生4 年・5 年・6 年
2.2.4 対象学年の選択理由
応募数 : 59 名 / 選考20 名 ※機材の制約もあり20 名で実施
学年、男女比のバランスを考慮し応募者から児童を選定
参考)大殿小学校応募状況・児童選定にあたり大殿小学校の教員方にもご協力いただく
応募総数 59 名当選者数は()内に表示
4 年 女子 10 人(3 人) / 男子 16 人(5 人)
5 年 女子 5 人(2 人) / 男子 11 人(4 人)
6 年 女子 1 人(1 人) / 男子 16 人(5 人)
※高学年では男子児童の応募が多い傾向。低学年では男女の応募状況の差が少なくなる
2.2.5 児童生徒募集に関する工夫
| 何を | いつ |
|---|
| 児童向けにFAB WALKER デモンストレーション |
募集期間中の昼休み時間に学校内で |
| 大殿小学校の先生方と連携 |
朝礼やホームルーム時など |
| 校内放送アナウンス |
昼休み時間 |
2.2.6 児童生徒の学習期間
期間:平成28 年11 月7 日 ー 12 月12 日 (全6 回)
場所:山口市立大殿小学校 視聴覚室 ※初回のみ図工室
1 講座:60 分 x 6 回 = 6 時間 / 補講 30 分 x 3 回 = 1.5 時間
2.2.7 児童生徒の学習内容
| 回 | 日時 | 内容 | 詳細 |
|---|
| 1日目 |
11 月7 日(月)
15:40 ー 16:40 |
FAB WALKER 組立
※初回のみ図工室 |
FAB WALKER(ロボット本体)を組立てます。 |
| 2日目 |
11 月14 日(月)
15:40 ー 16:40 |
プログラミング(1) |
基本操作、モーター、LED を制御する方法を学ぶ。 |
| 3日目 |
11 月24 日(木)
16:05 ー 17:05 |
プログラミング(2) |
復習、光センサ、超音波センサを制御する方法を学ぶ。 |
| 4日目 |
12 月1 日(木)
16:05 ー 17:05 |
デザイン(1)
※ホームワークあり |
自分の想像する生き物を動きから考え、
プログラムを組み合わせてデザインしていきます。 |
| 5日目 |
12 月5 日(月)
15:40 ー 16:40 |
デザイン(2)
※ワークシートあり |
プログラミングで制御した動きに合わせ、
身体部分もデザインしていきます。 |
| 6日目 |
12 月12 日(月)
15:40 ー 16:40 |
最終発表会
※ワークシートあり |
完成したオリジナルのFAB WALKER を発表します。 |
| 補講1 |
11 月14 日(月)
昼休み 30 分 |
組立 : 2名 |
完成しなかった児童対応 |
| 補講2 |
12 月5 日(月)
昼休み 30 分 |
プログラミング : 15 名 |
最終発表に向けての追い込み
希望者のみ作業可能に |
| 補講3 |
12 月12 日(月)
昼休み 30 分 |
プログラミング
発表前動作確認 : 15 名 |
最終発表に向けての追い込み
希望者のみ作業可能に |
※実施内容詳細は、別紙テキスト参照
2.2.8 児童生徒への講座に関する工夫
●「プログラミング+ものづくり教室」の特徴
(1) 生きものを育てるように、ロボットをつくる
コウモリやゴキブリなど実在する生物を例にあげながら、プログラミングによってできることを現実社会と関連づけて理解を深めていきます。自分のつくるロボットが光に反応して動いたり、障害物を避けるような仕組みにするなど、まるで生き物を育てるように、自由な発想でつくることができます。「こんなロボットにしたい!」というアイデアを形にする手段としてプログラミングに取り組むことにより、楽しみながら論理的思考や創造力、課題解決能力を育み、コンピュータ等の情報技術に関する知識や技術を身につけることができます。
(2) 双方に学び合い、やり遂げる力を育む
個の創造性とスキルを担保するために、全6 回の講座を通じて1 人1 台のFAB WALKER を作りあげます。組み立て、プログラミングによる制御、デザインなどの複数の技術を重ねあわせながら、作品を完成させることは大人でも大変なことです。それでも児童は、わかった人がわからない人を教えるなど、助け合いながら学び合いやメンターとの信頼関係を構築し、難しさと楽しさが混在する中で、自分のアイデアを形にするために努力を続けることを惜しみません。そうした試行錯誤する力や忍耐力の末に味わう達成感は学習者自身の自信へとつながっていきます。
(3) 新たな学習のためのマインドセットとスキルアップ
学習者が遊びと学習を行き来しながら、社会的かつ創造的な力を組み合わせる学習方法を取り入れています。座学とは異なり、すべて”つくりながら”基本的な考え方や機械の操作方法を学んでいきます。後半は各個人が自由につくるセッションが続きます。随所に遊びのような演習問題をちりばめながら、学習者のペースで制作を進め各自が設定したゴールを目指していきます。そこには、生徒たちに実験し、自らリスクを取り、自分自身のアイデアを実現しようとする姿勢が重要だと考えているからです。そして、本プログラムで同じくらい重要なのはメンターの育成であり、教科書どおりの内容をそのまま教えるのでは意味がありません。学科や世代を超えて協働するメンターと共に学習者に対する理解や特性を把握していきながら、学習者中心のプログラムのあり方や教材開発のスキル、学習者の創造性を引き出すファシリテーターとしての感覚を身につける取り組みです。
2.2.9 他地域にも再現可能なノウハウ
●地域連携型の教材開発ノウハウの共有
今回モデル事業として実施している、ファブラボ鎌倉とファブラボ山口との連携のように、全国にあるファブラボやFAB 施設と連携することで、場所や人、機材に関しての初期コスト(人集めや合意形成)などを円滑に行うことが可能になります。地域内での展開、地域を超えたノウハウの共有をスムーズに行うことが可能になります。
●学習者プロファイリングのノウハウと共有知の文化
学習者の傾向、時間軸での変化や、起こりうる課題など、ワークシートなど含めた成功や失敗などのノウハウなどを共有することで、教える側の対応のバリエーションも豊富になります。
●プログラムのバリエーション構築
プログラムの実施パターンは、ノウハウとして共有することができます。同時に、1 週間連続や2 コマ連続などバリーションを変えた場合の学習者の変化は、まだまだ未知の領域です。地域性を出しながら、地域連携型のプログラムにも発展できるのが、FAB WALKER の特徴です。
(ここ に続く)



